指令:
这个没有写完,回头补 基础
召唤吉祥物
1 | ros2 run turtlesim turtlesim_node |
查看服务列表,会显示服务类型及消息接口
1 | ros2 service list -t |
查看消息接口
1 | ros2 interface show turtlesim/srv/Spawn #在上一条命令后,[]内的内容是接口 |
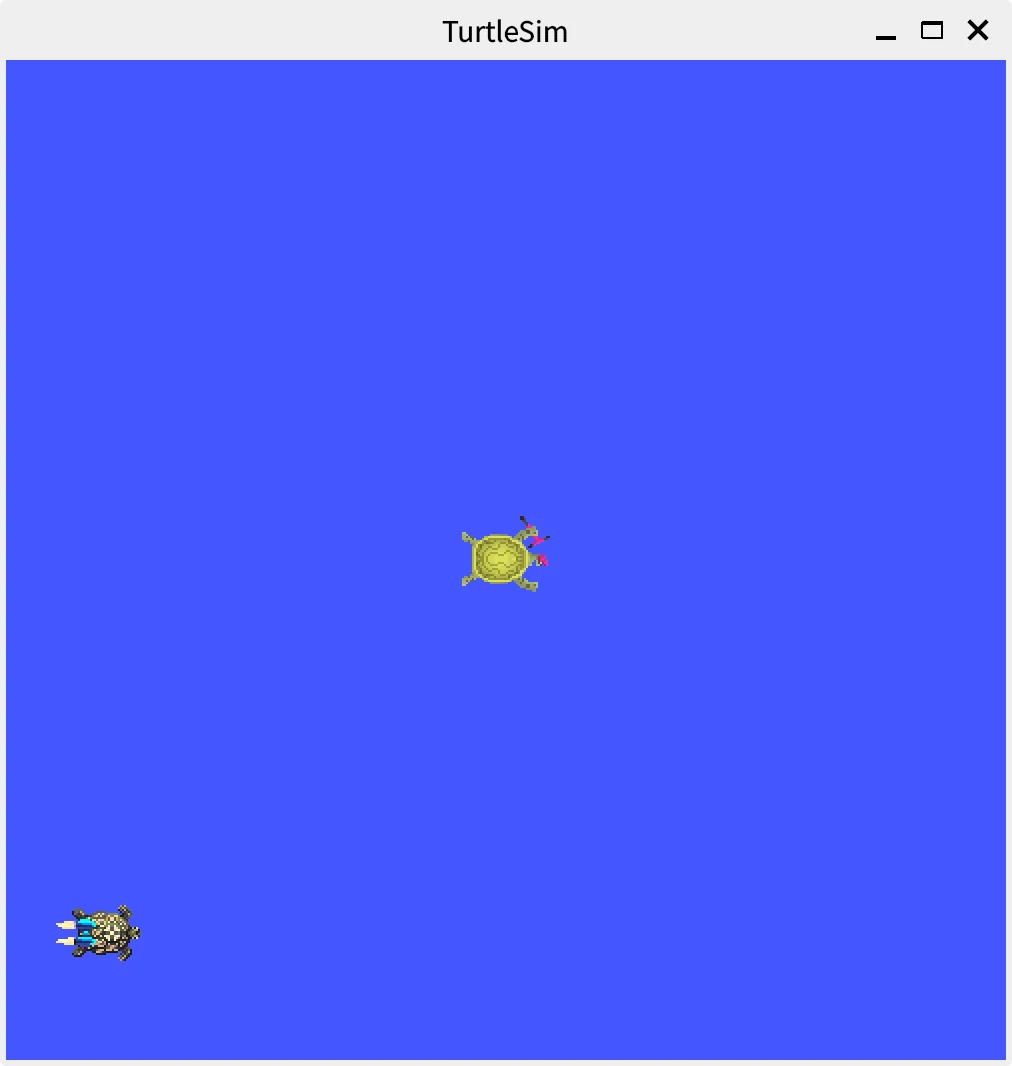
终端调用消息接口(召唤第二只乌龟)
1 | ros2 service call /spawn turtlesim/srv/Spawn "{x: 1,y: 2}" |
示例反馈
1 | requester: making request: turtlesim.srv.Spawn_Request(x=1.0, y=2.0, theta=0.0, name='') |
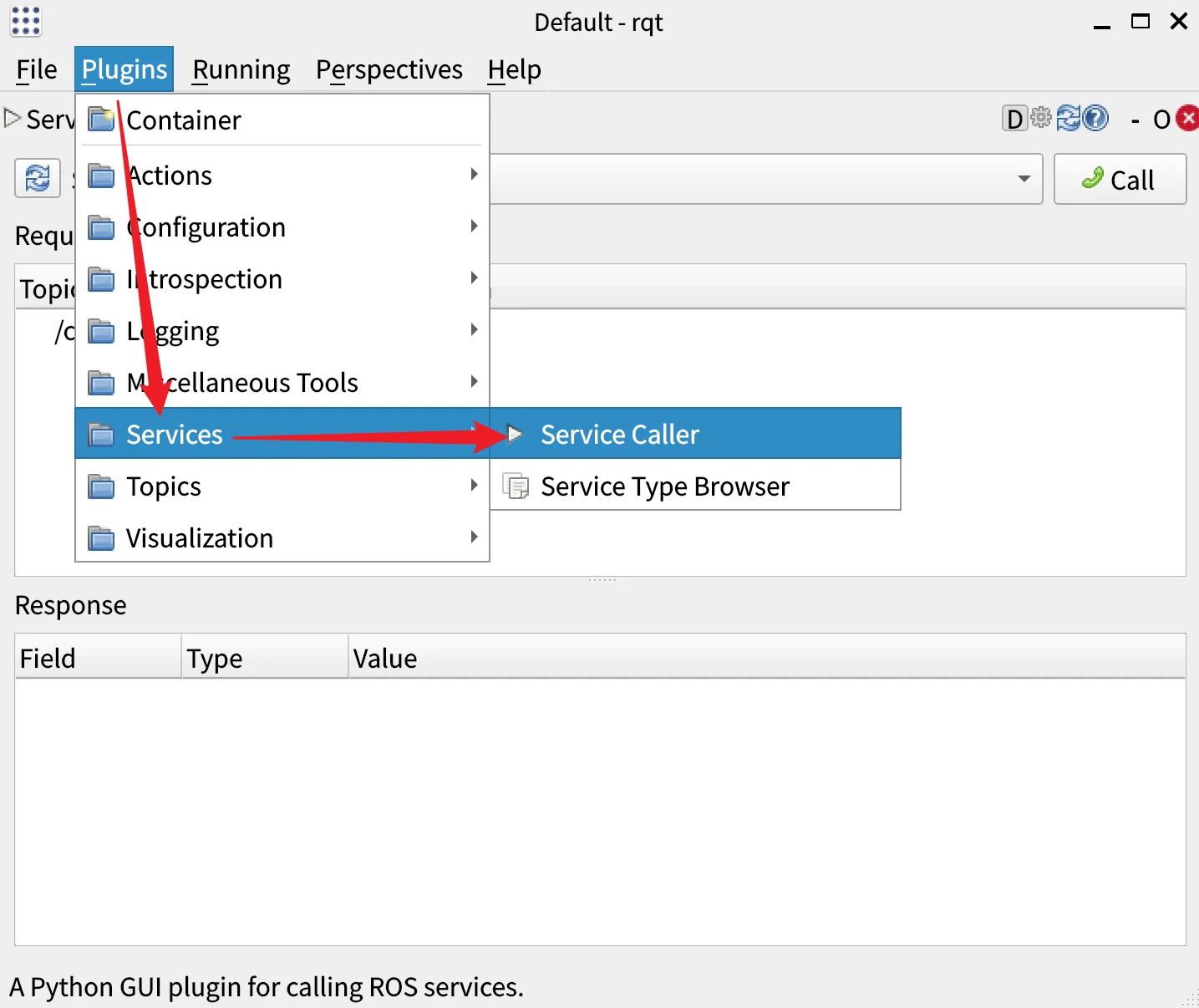
可视化接口调用:rqt
1 | rqt |